Computer graphics programmers hello world Software Ray Casting. New tutorial page on both web Assembly and Ray Casting. Both on Medium and here!

We visualize Denmark’s Digital Elevation Model in real-time, directly in a browser using WebGL. A virtual texturing technique is applied which enables us to handle a virtual raster size of 1048576 x 1048576 pixels. Hence, it is possible to cover the whole…
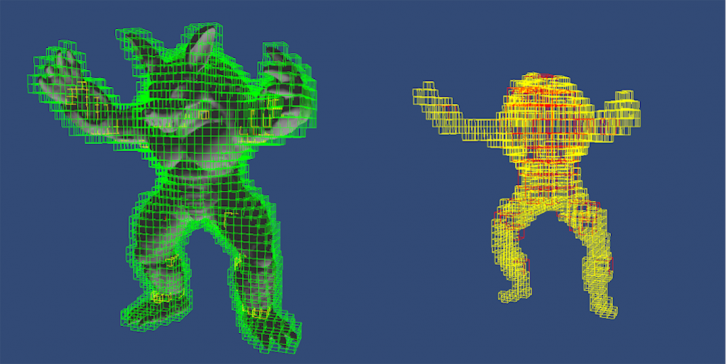
“Welcome computer graphics interested stranger!” This is the first installment of a my little tutorial series on mesh to sparse voxel conversion. Conversions between different representations are well described in articles and could be considered trivial. But there are always some challenges involved…

As part of our collaboration with the Institute of Bioscience. We have been asked to create a small program that is able to track and register the amount of boats passing through part of Sejerøbugten. There is a radar placed on…
As I (red: Jesper Børlum previous employee), was looking through the presentations from Siggraph Asia 2014, one presentation in particular caught my eye. Tristan Lorachs presentation on Nvidias upcoming manual Command-List OpenGL extension. With all the focus on reducing the…
Recent Comments